

NVIDIA GTC is in full swing in San Jose. This article recaps the second day of the event including CEO Jensen Huang’s keynote presentation.
The post The biggest robotics news from NVIDIA GTC day 2 appeared first on The Robot Report.

Day two of NVIDIA GTC is behind us. The highlight of the day was NVIDIA CEO Jensen Huang’s keynote session at the San Jose Arena. The arena was packed to the rafters with an estimated 16,000 attendees. Huang presented for nearly two hours, and at one point, brought the Disney BDX robot up on stage with him.
The Disney BDX robot entertained the crowd while NVIDIA CEO Jensen Huang discussed new robot products. | Credit: The Robot Report
While the session did cover some robotics news, the main focus of Huang’s presentation was to convince the mainstream media that the Deepseek launch last year was actually a great thing for NVIDIA’s business. NVIDIA is all in on what it defines as “AI Factories”, the next iteration of data centers optimized for running AI workflows based on NVIDIA architecture.
This part of the keynote highlighted the new Blackwell chip and new “Dynamo” software designed to make AI reasoning 40x faster than previous generations.
Robotics highlights from the keynote
Huang made several significant robotics announcements during the talk, starting with NVIDIA’s partnership with GM to develop next-gen vehicles, automotive factories, and robots.
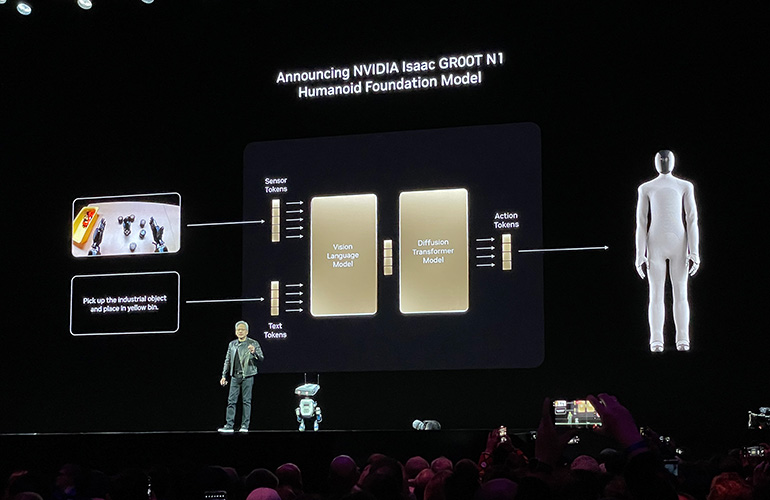
Additionally, NVIDIA announced it is open-sourcing GR00T N1. Later in the day, I had the opportunity to sit down with Akhil Docca, senior product marketing manager of NVIDIA Omniverse, to discuss the significance of this announcement.
NVIDIA designed GR00T N1 for versatility, enabling a single foundation model to power diverse humanoid robots. Developers can fine-tune it for specific applications and utilize its synthetic data generation capabilities to enhance training datasets. By open-sourcing the model on platforms like Hugging Face, accessibility is increased, lowering the barrier for researchers and developers.
The model advances AI robotics by moving towards a generalist technology capable of perception, reasoning, and action across various scenarios. This approach aims to accelerate innovation by providing a single, adaptable AI framework that can perform multiple tasks, promoting the development of more versatile and intelligent robots.
Developers can now fine-tune the model for specific use cases, making it more adaptable to different robotic applications. The model comes with a blueprint for generating synthetic data, which helps expand the diversity of training datasets and improve robot performance across various environments.
NVIDIA announced Cosmos at CES earlier this year, but at GTC, Huang reiterated the importance of Cosmos for robot development. NVIDIA Cosmos is a platform of state-of-the-art generative world foundation models (WFMs), advanced tokenizers, guardrails, and an accelerated data processing and curation pipeline. It is built to power world model training and accelerate physical AI development for autonomous vehicles (AVs) and robots.
Huang also announced Newton, an open-source, extensible physics engine being developed by NVIDIA, Google DeepMind, and Disney Research to advance robot learning and development. This is why Huang invited the Disney BDX robot onstage with him.
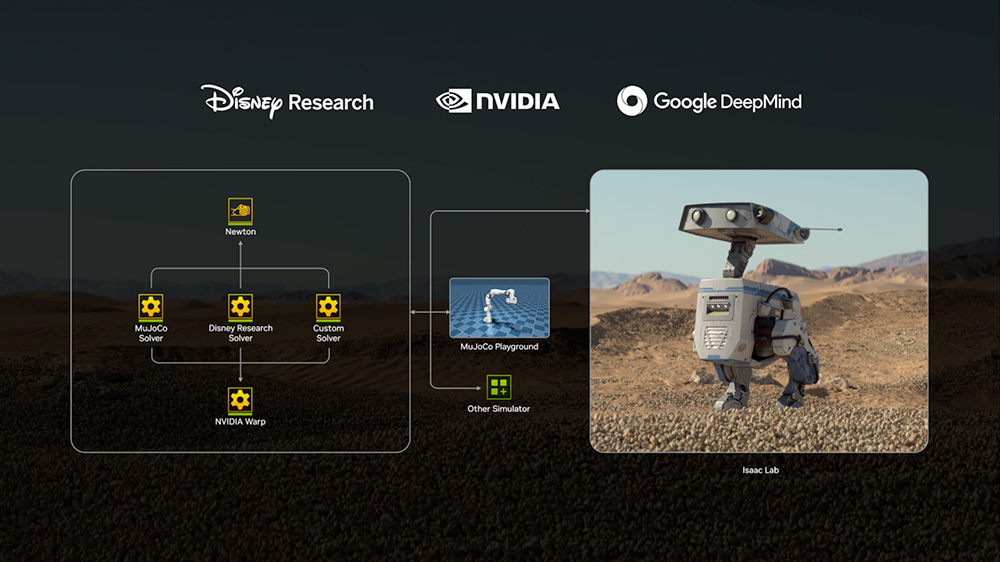
NVIDIA Newton diagram. | Credit: NVIDIA
Newton is compatible with MuJuCo, a widely used open-source physics engine for robotics research and development, specifically involving complex dynamics and contact-rich environments.
On the Cosmos and Newton announcements, Docca said, ”The genesis of that was really to build this next generation open source physics engine for humanoid robots. The idea was to be able to bring in physics that are applicable to humanoid robots as inertial motion, and friction, to better predict how the robot traverses. How does it handle dexterous manipulation.”
Agility Robotics and Boston Dynamics announce new NVIDIA enhancements
Yesterday, Agility Robotics announced companies also are collaborating to make Digit models available to partners through “Mega”, an NVIDIA Omniverse Blueprint.
Using foundational models is a game changer in terms of the rapidity and generality of bringing multi-purpose platforms like Digit into the world. Some highlights of today’s news include:
- Agility has an NVIDIA accelerator (GPU) in Digit that runs onboard AI models for perception and controls
- Agility uses IsaacSim and IsaacLab to train its AI models offline in the cloud
- Agility is working on support for the recently announced NVIDIA Mega platform (a large-scale simulator built on top of IsaacSim) so that customers like Schaeffler can put Digit into their facility-scale digital twins
In a separate announcement, Boston Dynamics revealed it has expanded its collaboration with NVIDIA to build the next generation of AI capabilities for humanoid robots. As an early adopter of the NVIDIA Isaac GR00T platform, Boston Dynamics’s Atlas robot is one of many humanoids using the NVIDIA Jetson Thor computing platform.
The compact size, high performance, and efficiency of Jetson Thor enables Atlas to run complex, multimodal AI models that work seamlessly with Boston Dynamics’ whole-body and manipulation controllers.
Developers at Boston Dynamics and its research partners are also making rapid breakthroughs in learned dexterity and locomotion AI policies using Isaac Lab, an open-source, modular framework for robot learning in physically accurate virtual environments, which is built on NVIDIA Isaac Sim and NVIDIA Omniverse technologies. The two companies are collaborating to define key platform parameters including functional safety and security architectures, as well as key learning and computer vision pipelines using NVIDIA’s training and simulation platforms.
Dr. Ken Goldberg entertains with his session
Dr. Ken Goldberg was surrounded by fans with questions following his GTC 2025 session. | Credit: The Robot Report
One of the sessions I attended in the afternoon was Dr. Ken Goldberg’s “Igniting the Real Robot Revolution Requires Closing the Data Gap.” The session was pure Goldberg, and it was standing room only in the room, as Goldberg took us through a history lesson on the development of Dexnet, the genesis of Ambi Robotics, and the pace of innovation for AI over the last five years. This is a session worth replaying, once the video is public. Goldberg was also a guest on our 2025 predictions webinar back in January 2025, watch the replay here.
NVIDIA takes over the city

NVIDIA CEO Jensen Huang is on stage with Hewlett Packard Enterprise CEO Antonio Neri at the GTC after-party on South Market Street in San Jose. | Credit: The Robot Report
Last year marked the return of a physical event for GTC, following the pandemic. This year, the event has grown, spilling out of the San Jose Convention Center (SJCC) and filling the streets for blocks around SJCC. The event completely blocks and gated the area on South Market between First Street and Almaden Blvd. At lunch, the area is filled with food trucks to feed the 20,000+ attendees, and at night there’s a night market with food and craft vendors and a stage with live music to entertain the crowd.
The post The biggest robotics news from NVIDIA GTC day 2 appeared first on The Robot Report.